9.3 Hyperbola and Rotation of Conics
|
A hyperbola is the set of all points (x, y) in a plane, the difference of whose distances from two distinct fixed points, the foci, is a positive constant.
The graph of a hyperbola has two disconnected parts called the branches. The lines through the two foci intersects the hyperbola at two points called the vertices. The line segment connecting the vertices is the transverse axis, and the midpoint of the transverse axis is the center of the hyperbola. A, b, and c are related differently for hyperbolas than for ellipses. For a hyperbola, the distance between the foci and the center is greater than the distance between the vertices and the center. The standard form of the equation of a hyperbola with center at (h, k) is 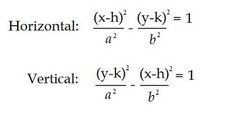
The vertices are a units from the center, and the foci are c units from the center. Moreover, c² = a² + b².
|
|
Finding the Standard Equation of a Hyperbola
|
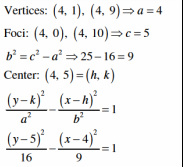
Find the standard form of the equation of the hyperbola with the given characteristics.
Vertices (4, 1), (4, 9) foci (4, 0), (4, 10) |
|
Asymptotes of a Hyperbola
Each hyperbola has two asymptotes that intersect at the center of the hyperbola. The asymptotes pass through the corners of a rectangle of dimensions 2a by 2b, with its center a (h, k).
Each hyperbola has two asymptotes that intersect at the center of the hyperbola. The asymptotes pass through the corners of a rectangle of dimensions 2a by 2b, with its center a (h, k).
The conjugate axis of a hyperbola is the line segment of length 2b joining (h, k + b) and (h, k - b) when the transverse axis is horizontal, and the line segment of length 2b joining (h + b, k) and (h - b, k) when the transverse axis is vertical.
Sketching a Hyperbola
|
Find the standard form of the equation of the hyperbola, find the center, vertices, foci and asymptotes of the hyperbola, and sketch the graph.
9y² - x² + 2x + 54y + 62 = 0 |

|
Using Asymptotes to Find the Standard Equation
|
Find the standard form of the equation of the hyperbola with the given characteristics.
Vertices (1, 2), (3, 2) asymptotes y = x y = x - 4 |

|
As with ellipses, the eccentricity of a hyperbola is
e = c/a
and because c > a it follows that e > 1. When the eccentricity is large, the branches are nearly flat, when the eccentricity is close to 1, the branches of the hyperbola are more pointed.
e = c/a
and because c > a it follows that e > 1. When the eccentricity is large, the branches are nearly flat, when the eccentricity is close to 1, the branches of the hyperbola are more pointed.
|
A hyperbolic mirror has the property that a light ray directed at a focus will be reflected to the other focus. The focus of a hyperbolic mirror has coordinates ( 24, 0). Find the vertex of the mirror given that has the mount at the top edge of the mirror has coordinates (24, 24).
|

|
General Equations of Conics
The graph of Ax² + Bxy + Cy² + Dx + Ey + F = 0 is one of the following.
Circle: A = C A≠0
Parabola: AC = 0 A = 0 or C = 0, but not both.
Ellipse: AC > 0 A and C have like signs.
Hyperbola: AC < 0 A and C have unlike signs.
The graph of Ax² + Bxy + Cy² + Dx + Ey + F = 0 is one of the following.
Circle: A = C A≠0
Parabola: AC = 0 A = 0 or C = 0, but not both.
Ellipse: AC > 0 A and C have like signs.
Hyperbola: AC < 0 A and C have unlike signs.
Classifying Conics from General Equations
|
Classify the graph of the equation as a circle, a parabola, an ellipse, or a hyperbola.9x² + 4y² - 18x + 16y - 119 = 0
16x² - 9y² + 32x + 54y - 209 = 0 y² + 12x + 4y + 28 = 0 x² + y² + 2x - 6y - 8 = 0 x² - 6x - 2y + 7 = 0 |
|
Rotation
The equation for conics with axes parallel to one of the coordinates axes has a standard form that can be written in the general form.
Ax² + Cy² + Dx + Ey + F = 0
Then there are those equations of conics whose axes are rotated so that they are not parallel to either the x axis or y axis. The general equation for such conics contains an xy term.
Ax² + Bxy + Cy² + Dx + Ey + F = 0
To eliminate this xy term, the rotation of axes procedure can be preformed. The objective is to rotate the x and y axes until they are parallel to the axes of the conic. The rotated axes are denoted as the x′ axis and the y′ axis.
After the rotation, the equation of the conic in the new x′y′ plane will have the form
A′(x′)² + C′(y′)² + D′x′ + E′y′ + F′ = 0
The rotation angle can be found through
cot 2θ = (A - C)/B.
The coefficients of the new equation are obtained by making the substitutions
x = x′ cos θ - y′ sin θ and y = x′ sin θ + y′ cos θ.
These substitutions were developed to eliminate the x′y′ term.
The equation for conics with axes parallel to one of the coordinates axes has a standard form that can be written in the general form.
Ax² + Cy² + Dx + Ey + F = 0
Then there are those equations of conics whose axes are rotated so that they are not parallel to either the x axis or y axis. The general equation for such conics contains an xy term.
Ax² + Bxy + Cy² + Dx + Ey + F = 0
To eliminate this xy term, the rotation of axes procedure can be preformed. The objective is to rotate the x and y axes until they are parallel to the axes of the conic. The rotated axes are denoted as the x′ axis and the y′ axis.
After the rotation, the equation of the conic in the new x′y′ plane will have the form
A′(x′)² + C′(y′)² + D′x′ + E′y′ + F′ = 0
The rotation angle can be found through
cot 2θ = (A - C)/B.
The coefficients of the new equation are obtained by making the substitutions
x = x′ cos θ - y′ sin θ and y = x′ sin θ + y′ cos θ.
These substitutions were developed to eliminate the x′y′ term.
Rotation of Axes
|
Rotate the axes to eliminate the xy term in the equation, Then write the equation in standard form. Sketch the graph of the resulting equation, showing both sets of axes.5x² - 6xy + 5y² -12 = 0
|

|
